 (资料图片)
(资料图片)
机械臂可以更精确、更快速、更高效地执行以往由人工完成的复杂操作,从而在现代工厂中发挥着关键的作用。机械臂既可以单独行动(机器人),也可以在协作环境中与人类操作员一起行动(协作机器人)。但无论是执行装配任务、拾取和投放还是处理危险材料,机器人和协作机器人都需要在机械臂末端安装传感器和执行器,即通常所说的末端执行器。若想实现轻量、灵活的机器人协作,还需要克服多个难点。
由于机械臂末端执行器方面的限制,许多应用都需要无线连接。无线连接使设计和外形尺寸更合理,而且无需考虑电缆,可实现连续旋转、更大的操作范围以及传感器和执行器的模块化部署等功能。它还能降低部署成本、维护成本(由于电缆磨损)和意外停机时间。
然而,传统的无线技术并不适合机器人和协作机器人提出的工业操作要求。在工业自动化中操作执行器和监控传感器需要极低的延迟和响应时间,以及高可靠性和抗干扰性。Wi-Fi、蓝牙和Zigbee等技术在此类应用中既不可靠,速度也不够快。
传统的无线技术是为IT(信息技术)和一般连接而设计的,而IO-Link Wireless则不同,它是为工业 OT(操作技术)和工厂自动化应用(如机器人技术)而设计的标准。作为IO-Link标准的扩展,IO-Link Wireless是一种确定性无线协议,可确保5毫秒的低延迟操作自动化。通过内置的抗噪功能,它的PER(数据包错误率)极低,仅为1e-9,比其他无线系统可靠6个数量级(一百万倍)。因此,IO-Link Wireless能够使机器人和协作机器人末端执行器的无线连接成为现实,其可靠性不亚于有线通信,而且不受约束。
为了实现这一解决方案,虹科TigoAir系列无线设备连接SOM(系统模块)可集成在机械臂末端,允许通过IO-Link wireless连接到末端执行器。它可无线连接到TigoMaster,后者最多可控制16台设备。TigoMaster既可以安装在机器人上,也可以安装在生产线的控制箱中,用于控制多个机器人的末端执行器。虹科TigoMaster能够通过已有的工业通讯协议(如EtherNet/IP,EtherCAT,PROFINET或OPC UA)与自动化PLC进行实时数据传输和控制,在工业以太网并行系统中还可通过 MQTT 和 OPC UA 等协议向 IIoT 平台发送监控数据。
关键词:
相关的文章>>
热门搜索:
资讯
更多
【新甘肃】甘州区...

抗菌新药逐渐放量...

证监会:进一步规...

华为云推出企业应...

2023年成都车展部...

今日葡萄牙队缺点...
图说健康
更多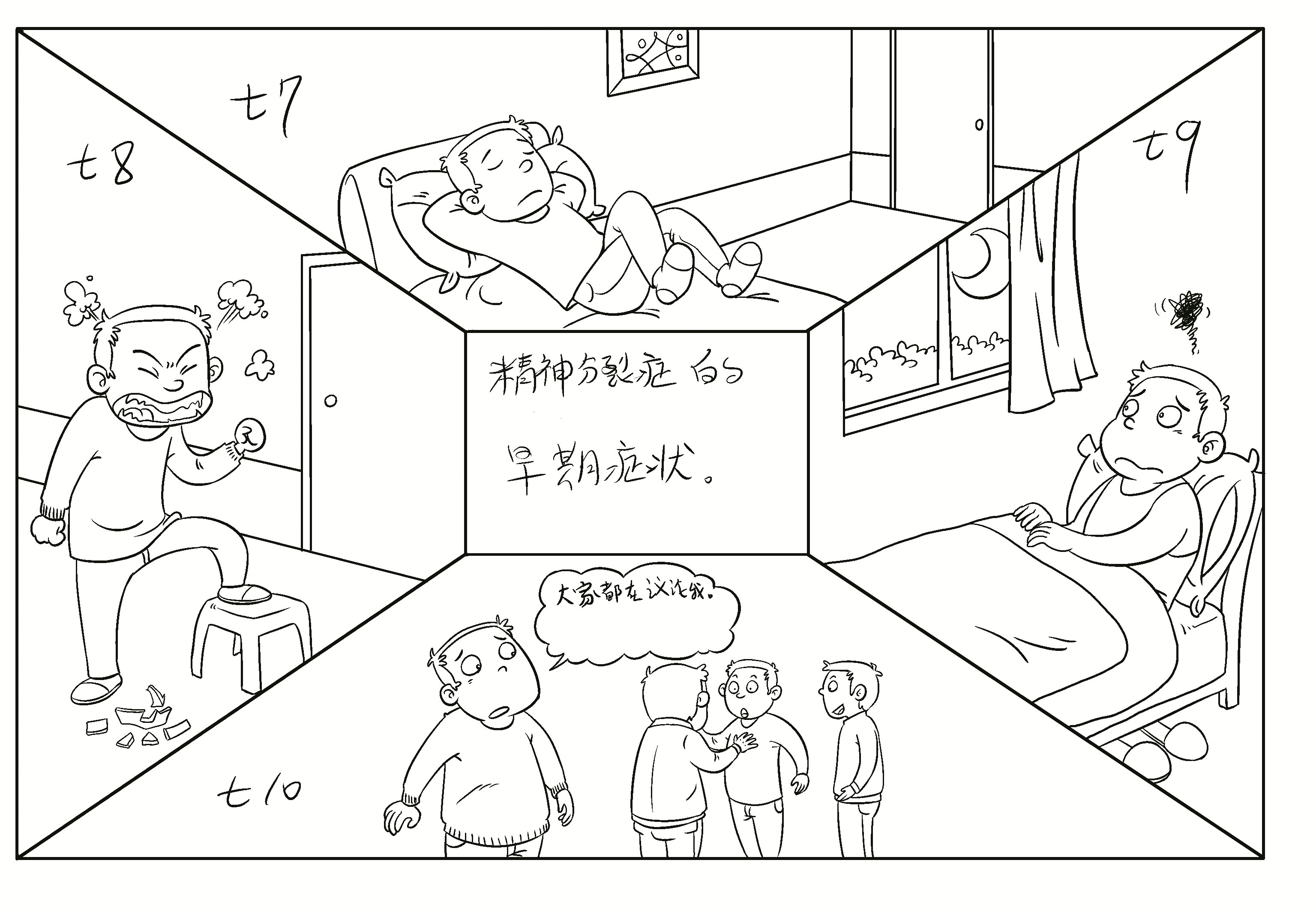
主要有无精打采,没有精神,不思进[t7] 取;情绪不稳定、易发脾...

病人血压突然升高,并伴有恶心、呕吐、剧烈头痛、心慌甚至视线...
患者精神症状消失3个月(慢性复发患者精神症状消失6个月)以上,...

疏风解毒胶囊的作用与功效是什么?疏风解毒胶囊可以起到解毒利咽...

艾叶的功效与作用有哪些?1、散寒止痛艾叶为菊科蒿属植物艾的叶...

治疗白发的偏方有哪些?1 桑白皮30克,五倍子15克,青葙子60...
常见疾病
更多体育健身
更多
8月29日北向资金增持33 5万股康诺亚-B(02162 HK)。近5个交易日中,获

2023杭州余杭区外卖消费券满减金额是多少满32元减16元5000张(仅限当期

项目名片海(拉尔)满(洲里)高速公路是绥满高速公路内蒙古境...

同时,小米在印度市场的业务调整取得明显效果,卢伟冰表示,未...

来为大家解答以上问题,乐视超级电视发布会全解,乐视超级电视...

新华社记者孙凡越摄今年3月,天津市发布《2023天津文旅品质年实...
